The verification and validation (V&V) process of automated driving systems is complex and extensive as shown in the figure below. Virtual verification and validation are followed by extensive testing on the test track as well as on-road testing.
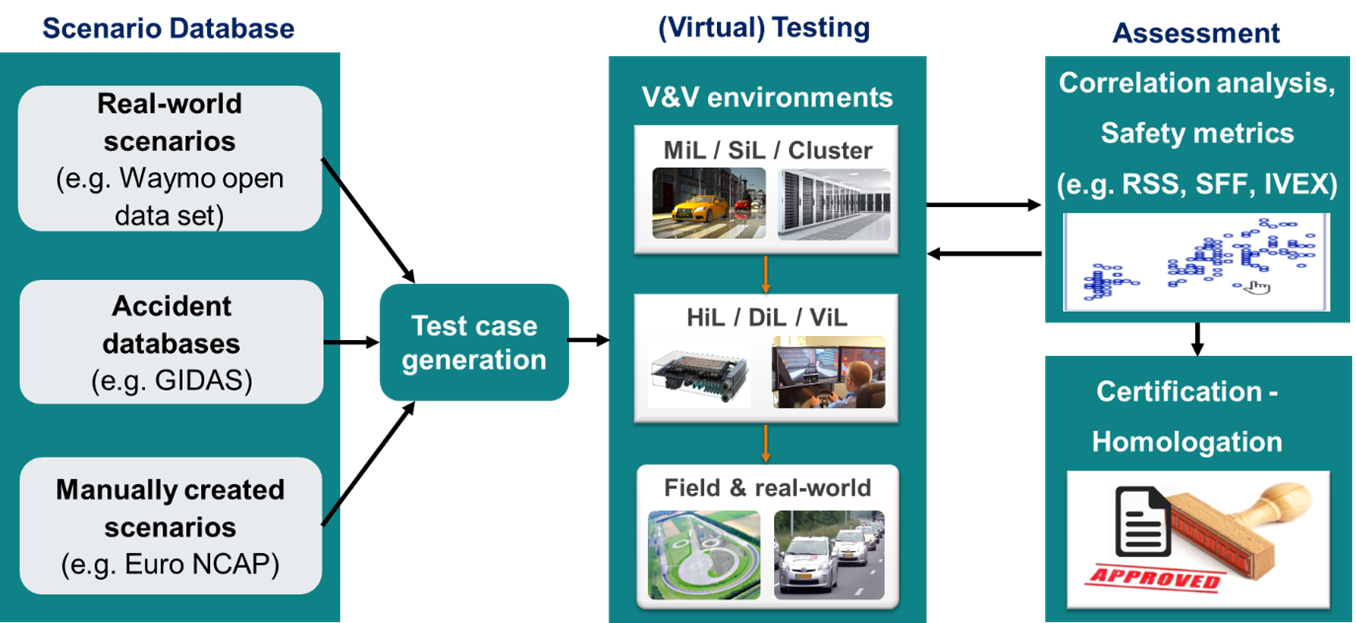
During V&V several aspects can be considered but our focus
in this project was on the functional safety aspects according
to ISO 26262 and SOTIF. The developers want to make sure that the
system operates according to the specifications during normal
operation mode, during failures and during limited functionality, too.
The real test environment – located in Hamburg, Germany – has been
virtualized using Simcenter Prescan. The vehicle dynamics model is
a 15 DOF (degree of freedom) model, built using Simcenter Amesim.
The static environment, the dynamics objects, the sensors, the
controller are all modelled using Simcenter Prescan (see short video).
The validation and verification process – considering a scenario-based
approach – is automated using Simcenter HEEDS Workflow Manager, which
allows quick performance assessment and sensitivity analysis.
Real tests and demonstrations are planned in December in Hamburg.
I’ll keep you posted.